- with sequence of detection results, matchs same object
- with reference frame, keep tracking same object
Tracking Based on detection sequence¶
Multi-Object Tracking Challenge:MOT Challenge
Great summay: Multi-Object-Tracking-Paper-List
SORT (ICIP 2016)¶
Simple Online and Realtime Tracking
signal filter: Kalman Filter + Hungarian algorithm
tempo smoothing
Notes for Kalman filtering
Official code: Python 2.7
deepSORT (ICIP 2017)¶
Simple Online and Realtime Tracking with a Deep Association Metric
SORT: singal filtering (Kalman filtering + Hungarian algorithm)
deep: neural network model for embedding feature of the image within bounding boxes
Single Object Tracking Based on reference frame¶
OTB Challenge and VOT Challenge
SiamFC¶
v1 (ECCV 2016), v2 (CVPR 2017)¶
Fully-Convolutional Siamese Networks for Object Tracking
Siamese Network: Siamese network
SiameseRPN (CVPR 2018)¶
High Performance Visual Tracking with Siamese Region Proposal Network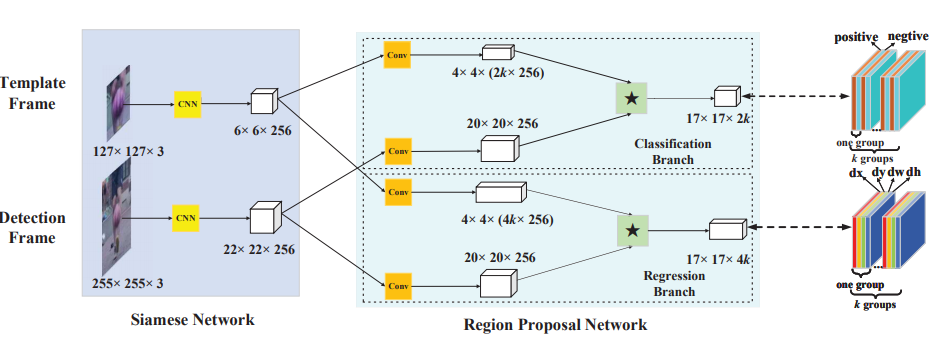 adding Proposal Regression Network
adding Proposal Regression Network
DaSiamRPN (ECCV 2018)¶
Distractor-aware Siamese Networks for Visual Object Tracking
Da: Distractor-aware
ECCV视觉目标跟踪之DaSiamRPN
在做完SiamRPN之后,我们发现虽然跟踪的框已经回归地比较好了,但是响应的分数仍然相当不可靠,具体表现为在丢失目标的时候,分类的分数仍然比较高(例如0.8+),换句话说,其实我们推断SiamRPN只是学习到了objectness/non-objectness的区分
- 加入detection的图片数据, pair可以由静态图片通过数据增益生成;加入detection数据生成的正样本之后,模型的泛化性能得到了比较大的提升.
- 用不同类之间的样本(还有同类的不同instance)构建难例负样本,从而增强分类器的判别能力
SiamMask¶
SiamRPN++ (CVPR 2019)¶
SiamRPN++: Evolution of Siamese Visual Tracking with Very Deep Networks 视觉目标跟踪之SiamRPN++